
Questo articolo non tratta del modello di macchina che possiamo acquistare compatibilmente con le nostre condizioni economiche, le esigenze personali e le preferenze estetiche.
Ci preoccupiamo invece di analizzare l’elemento su cui è da sempre e tuttora impostato e incentrato, nella maggioranza delle società, il modello generale di mobilità che da molti decenni condiziona pesantemente le nostre esistenze e l’ambiente, soprattutto in ambito urbano.
La tecnologia sta presentando varie tipologie innovative di automobili che puntano sul fattore ecologico (auto elettrica) e sulla sicurezza (guida assistita e autonoma) accreditandosi come modelli “risolutivi” in campo di sostenibilità.
Possiamo veramente considerare l’elettrico un motore pulito perfettamente integrato con una visione di città vivibile? E’ sufficiente qualche dispositivo di frenata assistita o la stessa “guida senza conducente” per poter assegnare a un’automobile il titolo di veicolo smart e sicuro?
Per rispondere a queste domande abbiamo individuato dei parametri fondamentali per valutare quanto una macchina sia compatibile con ecosistema, città e cittadini:
IMPATTO ECOLOGICO
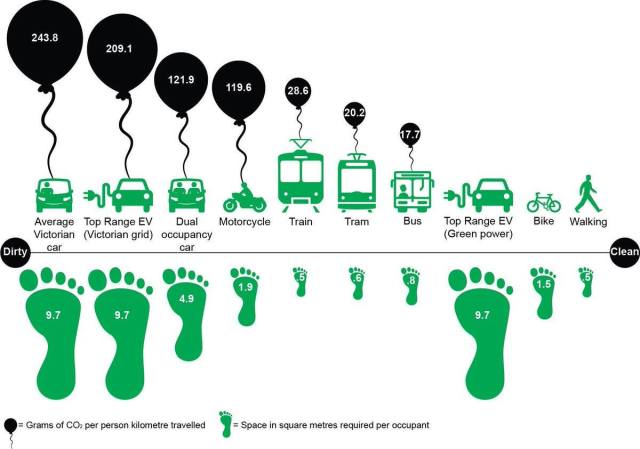
Ogni automobile ha un impatto sull’ambiente che va considerato globalmente dal momento in cui si procacciano le materie prime necessarie alla sua realizzazione (per la verità ancora da prima ovvero dall’elaborato processo di progettazione) fino allo smaltimento dello stesso mezzo al termine del suo ciclo di vita. Non è sufficiente dunque “pesare” solo le esalazioni dei fumi di scarico e considerare nullo l’inquinamento di un veicolo elettrico solo perché ha zero emissioni. Oltre ad altri fenomeni di produzione di polveri e scarti dannosi dovuti agli attriti e al consumo di oli vari, il peso e le dimensioni di un veicolo giocano un ruolo importante sia nei processi di fabbrica, variando la quantità di materiali necessari e i processi produttivi, sia nel consumo di energia necessaria per gli spostamenti a parità di distanze coperte.
COMPATIBILITA’ E VIVIBILITA’ URBANA
Le nostre città accusano un grave degrado degli spazi pubblici destinati alla mobilità, l’80% circa del totale a disposizione dei cittadini, quasi completamente occupati e congestionati dal monopolio invasivo del parco auto, circolante o in sosta. Anche in questo caso, a parità di numero di auto che insistono su un determinato territorio urbano, le dimensioni più o meno ridotte delle stesse possono fare buona differenza in quanto a ingombro e pervasività complessivi.
Sarà, inoltre, molto importante e fondamentale analizzare un fattore che possiamo definire “indice di sostituzione” ovvero la capacità di un’auto, usata in modo opportuno, di riuscire a sostituire un certo numero di altre vetture. L’esempio base è quello della condivisione dell’auto di proprietà tra due conoscenti o colleghi che per andare e tornare dal lavoro utilizzano, insieme, alternativamente il mezzo di uno e dell’altro. In questo caso il fattore di sostituzione, per una attività sistematica di questo genere è grossomodo di 1:2.
Un’auto in comproprietà tra 4 famiglie può avere il “replacement rate” di 1:4 se rappresenta da sola la risorsa che consente di rinunciare almeno ad un’auto per ogni nucleo familiare.
Un’auto in comproprietà tra 4 famiglie può avere il “replacement rate” di 1:4 se rappresenta da sola la risorsa che consente di rinunciare almeno ad un’auto per ogni nucleo familiare.
Ulteriore caso è l’auto a guida autonoma condivisa, a richiesta, non di proprietà, gestita da istituzioni, enti o società, fornita, ad esempio, tramite ricerca via app. Il servizio tipo sarebbe la prenotazione di un’auto driverless che arriva al momento e nel luogo prestabiliti, riceve a bordo il cliente, lo porta a destinazione e poi è immediatamente disponibile per il servizio/passaggio successivo. In questa ipotesi il tasso di sostituzione potrebbe essere molto alto, aggirandosi da 1:20 a 1:50, potendo ogni auto a guida autonoma condivisa arrivare a sostituire la produzione, la proprietà e l’ingombro da 20 a 50 auto tradizionali di proprietà.
SICUREZZA
Il requisito della sicurezza di un’automobile attiene solo in minima parte a fattori come i dispositivi elettronici di assistenza alla guida o alle caratteristiche più o meno avanzate di sistemi di protezione, frenata e illuminazione.
In questo caso non possiamo valutare la prima causa di sinistrosità, lesività e mortalità stradali, ovvero il fattore umano, ma ci limitiamo a valutare il potenziale offensivo (grado di offensività)
La stessa guida autonoma di massimo livello, ovvero quella che consente di non utilizzare un conducente ai comandi, e che come primo requisito dovrebbe avere la tutela dell’incolumità del passeggero e di tutti gli altri utenti della strada, ha come limite proprio i parametri di programmazione dei sistemi informatici e telematici di guida.
La stessa guida autonoma di massimo livello, ovvero quella che consente di non utilizzare un conducente ai comandi, e che come primo requisito dovrebbe avere la tutela dell’incolumità del passeggero e di tutti gli altri utenti della strada, ha come limite proprio i parametri di programmazione dei sistemi informatici e telematici di guida.
Possiamo dire che per un’automobile tradizionale a guida umana il grado di offensività per i passeggeri e i soggetti circostanti, a parità di altri fattori, è proporzionale al peso/dimensioni del veicolo e della velocità che può raggiungere. Analogamente per la guida senza conducente lo stesso indice può essere rappresentato dai parametri più o meno cautelativi (ad esempio velocità urbana) impostati dall’uomo all’interno del software di programmazione.
Andiamo dunque dalla vettura più pericolosa, quella grande, veloce e a guida umana, a quella più sicura, quella leggera, piccola, con una guida autonoma impostata sulla massima riserva cautelativa, passando per tutte le configurazioni intermedie.
CARATTERISTICHE DI FABBRICA
Abbiamo potuto osservare che alcuni fattori attinenti ai parametri costruttivi dell’autoveicolo rientrano in modo decisivo nelle tre categorie precedenti. Si tratta di peso e dimensioni della vettura oltre che della velocità massima che tale vettura può raggiungere.
Una riflessione sul senso di utilizzare un mezzo di due tonnellate per spostare 80 chilogrammi di essere umano in città si impone in modo serio e importante, considerate tutte le condizioni precarie di equilibrio ambientale, congestione urbana e pericolo stradale già illustrate.
Ingombro auto
Ingombro auto
Per la velocità più “sicura” si pone come punto di riferimento naturalmente la guida autonoma, nel senso già esposto di parametro impostato dall’uomo ispirandosi alla massima moderazione, soprattutto in ambito urbano, luogo che riteniamo di migliore applicazione per la tecnologia driverless. Ma anche per le auto a guida umana è possibile attuare soluzioni tecnologiche dedicate al controllo e all’impostazione specifica della velocità massima di guida in tempo reale.
QUALE AUTO?
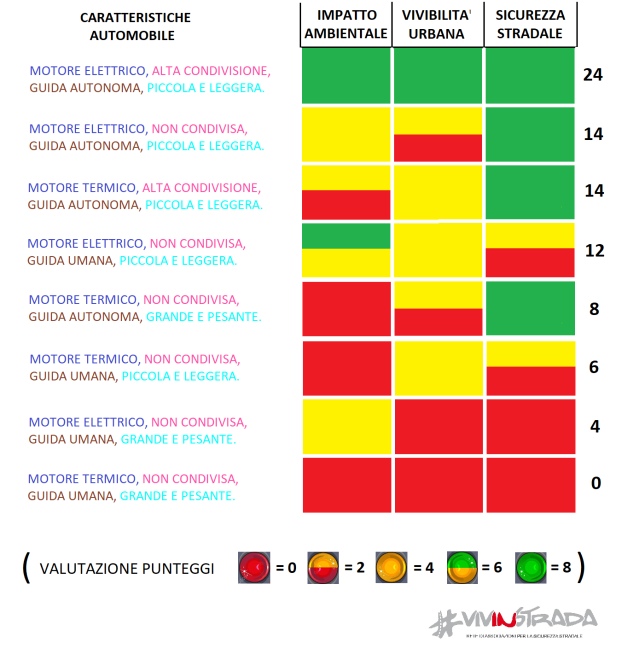
Partendo dalla considerazione e la combinazione di questi 4 requisiti principali appena elencati possiamo realizzare una matrice multicriteri per la valutazione delle varie tipologie di auto a cui ciascun diverso mix di requisiti fa riferimento sulla base di tre parametri:
– IMPATTO AMBIENTALE
– VIVIBILITA’ URBANA
– PREVENZIONE STRADALE.
Assegnando un punteggio da 0 a 8 a seconda, rispettivamente, della peggiore o migliore valutazione di ogni aspetto preso in considerazione possiamo ottenere una classificazione ordinata che va dalla peggiore tipologia di automobile, quella di grandi dimensioni, veloce, a combustibile fossile e non condivisa, quella attualmente più diffusa, alla migliore ipotesi di autoveicolo a cui dovrebbero tendere sia l’industria che decisori e collettività per inserire funzionalmente questa modalità di trasporto, l’unica compatibile, nel più ampio panorama di cui si compone l’universo mobilità.
Nello specifico, l’unica tipologia di autoveicolo compatibile con ambiente, città e cittadini è un mezzo di piccole dimensioni, leggero, elettrico, con alto tasso di sostituzione, non di proprietà e a guida autonoma.
Nello specifico, l’unica tipologia di autoveicolo compatibile con ambiente, città e cittadini è un mezzo di piccole dimensioni, leggero, elettrico, con alto tasso di sostituzione, non di proprietà e a guida autonoma.
Se andiamo a cercare le tipologie di auto che puntano solo su elettrico o sulla guida autonoma le troveremo molto in basso in classifica, rispettivamente in penultima e quartultima posizione. A conferma che per l’ennesima volta ci troviamo in un campo drammaticamente saccheggiato da falsi miti e leggende metropolitane.
(Grazie a Marco Martens per l’idea della matrice multicriteri.)
VISION SUL MODAL SPLIT
Non dobbiamo mai perdere di vista la visione base su cui poggia la struttura sostenibile della mobilità, in particolare quella urbana.
L’attuale ripartizione modale è in modo aberrante squilibrata verso un (ab)uso del mezzo privato a motore che, in città come Roma, ad esempio, raggiunge la devastante misura di circa il 70% degli spostamenti.
La nuova concezione di automobile, come qui rappresentata, dovrebbe essere funzionale ad una rimodulazione complessiva che veda indicativamente come obiettivo questa situazione, compatibilmente con ogni singola realtà territoriale:
40% trasporto pubblico / collettivo;
30% spostamenti a piedi e in bici;
20% spostamenti elettrici, leggeri, a guida autonoma on demand;
10% mobilità critica tradizionale possibilmente ad esaurimento graduale e progressivo.
Alfredo Giordani
Rete #Vivinstrada
